Bioflows
Numerical computation of blood flow through human arteries may save
many experiments and may give information about the probable outcome of
potential surgical intervention. It makes it possible to investigate many
variants without such a risk as physical intervention. Beside that simulations
help to understand the phenomena that take place inside human body.
Computational Fluid Dynamics delivers more information than measurements and
the results of computer simulation are more and more realistic due to
continually increasing computer power and numerical methods evolution.
Physics of blood flow
Blood flow behaviour may be described by Navier-Stokes and continuity
equations
(1) 
The general form has too many unknown
variables. We need another equation known as the Newtonian
hypothesis. It describes a linear relation between the
stress tensor ![]() and the strain rate tensor
and the strain rate tensor ![]()
(2) ![]()
where the strain
rate tensor is given by
(3) ![]()
Having 10 scalar formulas (1 scalar + 1 vector
+ 1 symmetrical tensor) we still have 12 unknown variables: ![]() . We may treat blood as an incompressible medium then
. We may treat blood as an incompressible medium then
(4) ![]()
The 12 scalar formulas can be rewritten now as
follows
(5) 
There are 4 equations and 5 unknown variables: ![]() . It is necessary to decide whether to treat blood as
Newtonian or non-Newtonian. A non-Newtonian behaviour allows a relationship
between viscosity and velocity gradients according to the following power law
. It is necessary to decide whether to treat blood as
Newtonian or non-Newtonian. A non-Newtonian behaviour allows a relationship
between viscosity and velocity gradients according to the following power law
(6) ![]()
where k and n are constants and units
(7) ![]()
for
Newtonian fluids we have ![]() and for
non-Newtonian
and for
non-Newtonian ![]() . E.g. for blood
. E.g. for blood
(8) ![]()
and shear strain rate ![]() for a general 3D case
for a general 3D case
(9) ![]()
Finally, the fifth non-linear equation is
established, which describes the non-Newtonian behaviour of blood
(10) ![]()
Formulas (5) and
(10) may be solved numerically using the Finite
Volume Method or the Finite Element Method. Analytical solution of Navier-Stokes
equations is only possible for very simple geometries such as tube and flat plates.
For the tube
shown in the figure above equations (5) and (10) are simplified due to one
dimensional velocity field and steady state conditions to
(11) 
the solution of
this steady state and non-linear differential equation describing non-Newtonian
blood flow is presented below and can be used for code validation
(12) 
There is also the
solution of unsteady state flow in a tube known in literature as Womersley
flow. That flow is forced by pressure gradient described by the sine function.
In real life the geometry does not look like a tube, flow is unsteady state and
boundary conditions are not similar to sine function. Realistic boundary
condition forcing the flow is presented below.
Blood flow
through realistic geometries
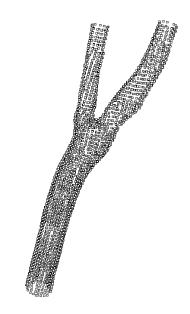
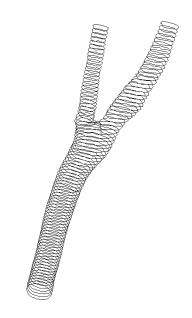
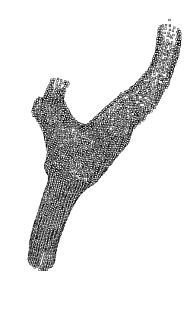
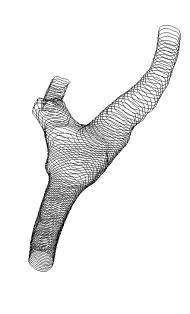
Magnetic Resonance Imaging (MRI) technique makes it possible to obtain
realistic geometries of human arteries. However a set of digital pictures must
be first post-processed using digital image procedure to separate contours of
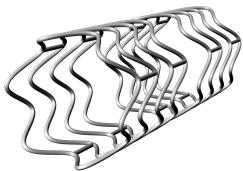
the arteries. Having contours one must ‘vectorise’ the geometry for further
discretisation. An example of vectorisation is shown below.
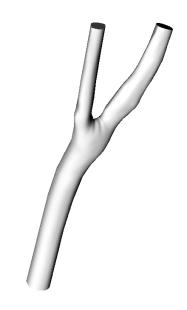
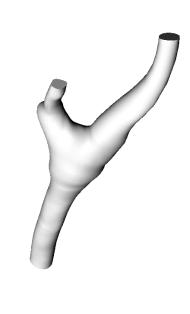
Such prepared geometry is ready to disretisation and calculation using
CFD software. As a result of the numerical solution we have among others
velocity field and pressure that are used for further calculation such as wall
shear stress or dissipation (presented below).
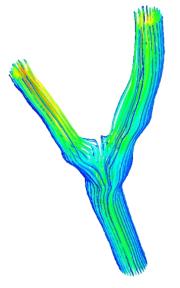

Stream
lines and pressure distribution
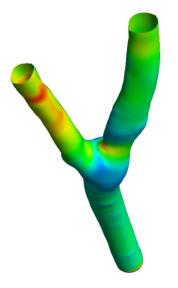
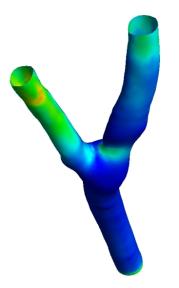
Wall shear
stress and dissipation intensity distributions
Shape optimisation of some
biomedical devices
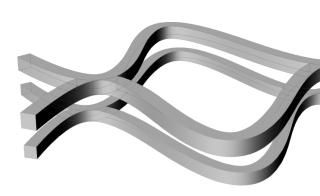
Stents are metallic cage-like structures that are inserted into an
artery blocked by calcified plaque (stenosis). There are a lot of possible
patterns of stents that present thousand of potential solutions. Thus stents
differ significantly in shape, cross-section, and other details, which affects
the haemodynamics of the blood flow through the treated region.

A simplification must be introduced to describe the richness of stent
shapes concentrating on a few major features to cover a relatively large design
space.
Numerical solution of
blood flow around the stent is obtained using CFD. However CFD is time
consuming. Therefore Genetic Algorithms were used as a method for finding
improved stent design as they offered quick convergence. Another advantage of
GA is that it does not need additional information about the objective fitness
function. Such information is inaccessible in this stent application due to the
complicated nature of performance measures.
One could imagine a lot of different fitness
functions. It is believed that Wall Shear Stress plays the most important role
in biomedical flows. However as WSS is distributed along the surface it cannot
be directly used as a performance measure in driving a search algorithm that
needs a number(s). Indeed two different WSS distributions cannot be compared
directly, yet it is possible to define such a performance based on that
distribution.
We define
wall shear stress norm
(13) ![]()
where S is
the speculative surface and average wall shear stress is given by
(14) ![]()
Such a definition yields a
single number characterising the distribution of ![]() . It should be borne in mind that if a number is generated
from the 3D distribution then information is always lost.
. It should be borne in mind that if a number is generated
from the 3D distribution then information is always lost.
Dissipated power is
introduced here as an alternative performance measure. Let us consider a form of the Gibbs equation
that has the shape of an energy equation:
(15) ![]()
where T is temperature and ![]() is the intensity of
entropy production. As blood is incompressible and we neglect the heat
conductivity we have
is the intensity of
entropy production. As blood is incompressible and we neglect the heat
conductivity we have
(16) ![]()
In other words the
dissipated energy causes an incremental change of internal energy. The effect
of this energy dissipation is an increase of local temperature. Intensity of
entropy production may be calculated from the velocity field (for an
incompressible medium).
(17) ![]()
It can be proved that not all of the work in
Equation 12 is converted into kinetic energy
(18) ![]()
The energy that is not converted is dissipated. Therefore dissipated
power is defined as follows
(19) ![]()
or dissipated energy
(20) ![]()
Minimising such an objective
fitness function helps us to search for a stent shape with the smallest contribution to energy losses. The solutions found
using both these measures: the dissipated power and WSS distribution are
compared below. Both results
look more or less like the first stent presented in the above.
Nomenclature
![]() density
density
![]() velocity
velocity
![]() gravity
acceleration
gravity
acceleration
![]() stress tensor
stress tensor
p
pressure
![]() dynamic viscosity
dynamic viscosity
![]() identity tensor
identity tensor
![]() strain rate
tensor
strain rate
tensor
![]() wall shear
stress
wall shear
stress
![]() dissipation
intensity
dissipation
intensity
T temperature
e internal energy